被称为“微博之王”,传言要收购微博,并且在微博上怼人几乎没输过的理想CEO李想,最近居然在微博上公开道歉了?!
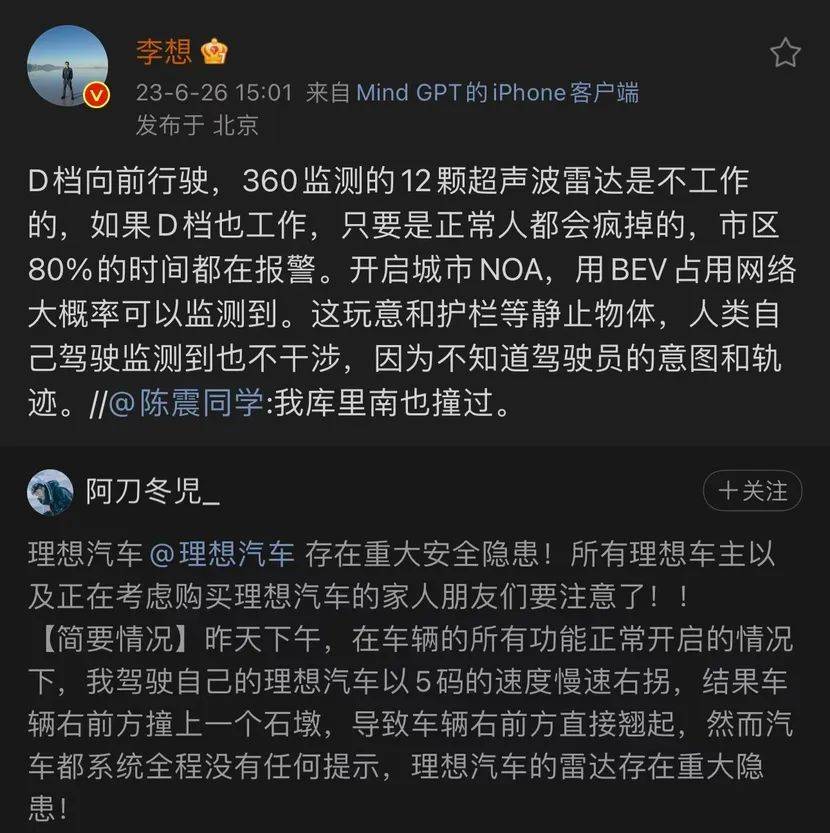
事情是这样的。此前有理想L7车主发文吐槽在低速行驶时雷达不工作,车辆系统也没有任何提示,导致其撞上路面石墩,造成车辆损坏。
相关博文在网上传开后,李想立即在微博发文回应,称车辆D挡向前行驶时,全部超声波雷达都是不工作的,否则在市区行驶80%的时间都在报警。并称只有开启城市NOA(城市导航辅助驾驶)功能后才大概率会监测到路边石墩。
李想回应车主的博文(已删除)
李想的这番言论不仅受到网友的质疑,还受到理想内部产品和研发部门的批评,矛头直指雷达不工作一事。随后,李想删除原微博,并发了一条道歉微博,称车辆在D挡低速行驶时雷达是工作的,而且能测距,能监测障碍物,还能联动360环视。
李想道歉博文
简而言之,就是李想在未了解车辆相关工作原理的前提下,本能地回怼车主的质疑,并对车主进行理论说教,发现舆论风向对自己不利时,才自称“有错就改”挽回舆论形象。
对于李想在微博上的各种暴论,大家应该都见怪不怪了,我们更应该关注的应该是事故本身。
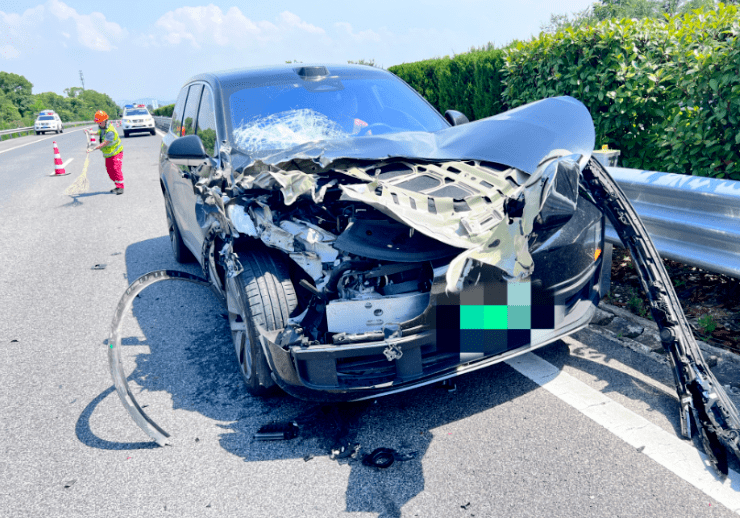
虽然那位L7车主的损失不算太大(维修费用约2600元),但如果撞到的不是石墩,而是蹲坐在路边的小孩或老人,那事情的性质就完全不一样了!
车主原博文(已删除)
在此我们替广大吃瓜群众向理想发出一个灵魂拷问:为何全身挂满高性能传感器、采用业界领先算力平台的理想,连最基本的低速碰撞都避免不了?
D挡下超声波雷达究竟该不该工作?
01
这次事件最大的争议点,就是理想的雷达在低速工况下该不该工作、能不能工作。这里的“雷达”指的是“超声波雷达”,相关工作原理大家网上搜就可以了,其主要作用是测量车辆周围的障碍物,主要应用于辅助泊车场景。
这其实就是我们听得最多的“倒车雷达”,是业内发展得最早、普及范围最广的一类雷达,90年代初就开始搭载在汽车上,不管是十几年前的老旧燃油车,还是最新的智能汽车,目前能在路上跑的家用车,基本都配有这种雷达。
而那位理想L7车主所遇到的,正是超声波雷达最该发挥其避障、测距功能的场景。要知道,在我们倒车入库的时候,往往不是一把就能倒进车位停好的,前后挪移调节位置是必然会遇到的,若按照李想之前所说的“D挡向前行驶时超声波雷达不工作”,那理想的超声波雷达必然存在严重的设计问题!
李想L7超声波雷达位置
按照正常的使用逻辑,车辆在低速前行的时候,超声波雷达是必须工作的。目前主流的超声波雷达探测距离最近约3厘米,最远可达5米,但这只是硬件的基础性能,系统什么时候该果断报警,什么时候该避免干扰,完全取决于相关控制系统的工作逻辑,如果真的会出现“市区行驶80%时间都在报警”,那这辆车的控制逻辑得有多智障?
至于为何这台理想L7会撞上石墩,网友众说纷纭,参考理想售后的说法,大概原因是石墩太矮,路面有坡度,同时石墩光面反光,导致雷达误判,售后人员同时还劝告车主不能对智能雷达太信任……一切能解析的理由都找出来了,反正就是不承认车辆有问题。
最基本的安全防护都没做好,谈何高阶智驾?
02
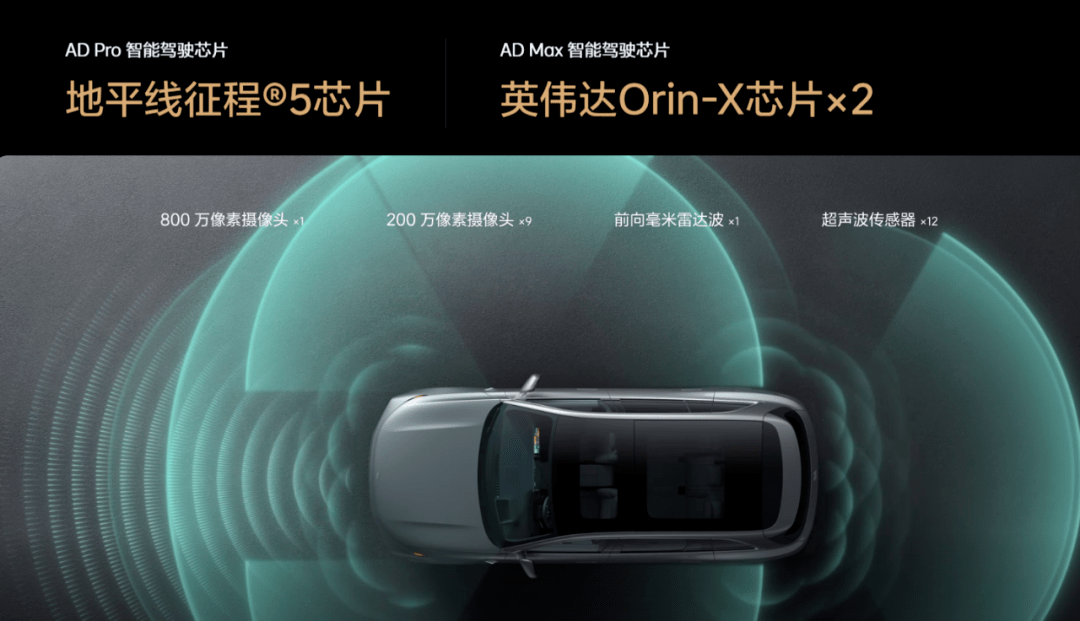
表面上,这只是一次小磕碰,但背后反映出的问题却让人细思极恐。正如上文所说,超声波雷达是理想L7身上最简单、最基础的一个传感器硬件,技术含量和成本都不高, 全车共配有12个,但这套系统连最基本的测距避障功能都不能保证正常工作,还如何做好高阶智能驾驶辅助?
目前,包括理想在内的许多新能源车企都在积极发展高阶智能辅助驾驶技术,从最初的高速工况自动变线超车、自动驶出匝道,发展到城市环境自动沿导航行驶,甚至还能在不依赖高精地图的情况下,只依靠摄像头和激光雷达行驶到目的地。
高阶智驾的应用范围越来越广,加上车企在宣传话术上的渲染,极容易让消费者产生“智能驾驶已十分成熟”的错觉,因此我们不时会看到某些车主的脑残行为:有躺在主驾上玩手机的,有在方向盘上套配重环的,有的还干脆把主驾放平睡觉……
但无数恶性事故告诉我们,这些智能驾驶还真没我们想象中智能。
就在本月初,S14杭长宜高速上,一辆理想L9以120km/h的速度追尾前方变道的货车,警方调查后发现,碰撞时理想L9正使用NOA自动辅助驾驶系统在行驶,系统有监测到碰撞风险,但并未进行自主制动。
理想官方表示,系统发出警示时,驾驶员应及时接管车辆,认为该事故是驾驶员注意力不集中导致。但我就想问,理想的NOA系统中,难道不包括AEB自动刹车辅助系统吗?车辆快要追尾的时候,难道不应该自动进行应急制动吗?
也许是两车相对速度太快,又或者是前车在进行“自杀式变线”,但作为一辆配备了128线程高分辨率激光雷达,搭载双英伟达Orin-X芯片,算力高达508TOPS的智能汽车,为何连自动刹车的动作都没有?
小结:
无论是撞石墩,还是追尾前车,本质上都是驾驶辅助的基本功尚未做好。像碰撞警示、自动刹车等“L1级别”的功能,都是用户最常用到,也是最能救命的,但如今车企的精力都放在各种前瞻性应用上,一心想着如何让用户放开双手,但却忽略了最基础的安全问题。
前不久,理想宣布他们的城市NOA(城市领航辅助驾驶)马上要开始内测了,据说是不依赖高精地图,利用增强BEV(Bird's Eye View,鸟瞰图)大模型来感知路面环境的“高级货”。
这套系统的实际效果如何,目前尚未得知,但从他们发布会上公布的首测视频来看,表现确实让人捉急:测试车辆在右转时为了避让占道车辆,居然自主驶离了目标车道,并越过了路中的双黄线……
拜托了,相关车企在研发智驾系统时可不可以踏实点,先把最基本的安全性做好,再考虑那些高阶功能吧,别出事后要么责怪车主,要么尴尬道歉,那真的很不负责任。