很多人都说,新能源车的上半场是电动化,下半场是智能化。
而智能化里面,最重要的是自动驾驶,所以目前几乎所有的汽车,都在讲智能驾驶。
数据显示,2023年中国市场乘用车前装标配ADAS交付1238.1万辆,而NOA功能搭载量达94.5万辆,不过大部分集中在高速NOA,而城市NOA搭载量为23.8万辆。
但是在2024年,我们看到各大车企们,全面搞城市NOA了,华为、小鹏、小米、蔚来、理想们,都是在全国开城……
当然,作为智驾领域的最典型的代表选手特斯拉,不仅在方案上和国内车企不一样,甚至在算法上,也开始激进了。
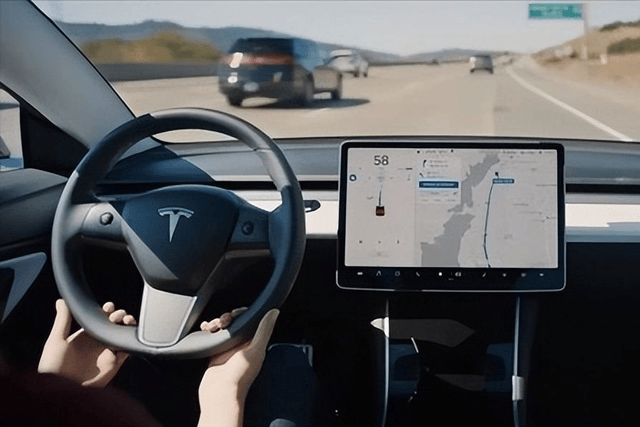
我们知道,相比于国内采用激光雷达的方案,特斯拉采用的是纯视觉,即只使用摄像头来进行信息的获取,然后通过算法,实现自动驾驶。
而在算法上激进,那就是特斯拉将AI大模型引入自动驾驶,采用端到端技术,用3000行代码,替代了原来的30万多万行C++代码。
马斯克是怎么做到的?这里可能要多说几句了。
我们知道以前的自动驾驶,是通过传感器,采集信息,比如车在什么位置,周边是什么环境,然后算法再利用这些信息,根据系统中制定的规则,来控制车辆,接下来该怎么走,怎么操作方向盘、控制刹车,油门等。
这中间最重要的就是规则,这些规则是预设好在系统中的,比如变道、加速,超车、泊车等,都是工程师通过代码来实现的。
这些所有规则都考虑到,然后再整合成整个自动驾驶系统,因为规则多,步骤也复杂,所以需要几十万行代码,也就是特斯拉之前的算法,30多万行C++代码。
而采用端到端技术之后,就不一样了,不再需要在系统中预设这些规则了。
算法的本质是一个AI模式,摄像头获取的信息输入到神经网络,然后神经网络直接输出车辆控制指令如转向、加速、刹车等等。没有那些预设的规则,当然代码就精减了,从原来的30万行,变成了3000行。
但这中间,也有一个难点,那就是AI是要靠训练出来的,不是天生就会的,需要通过学习各种类型的驾驶视频,形成自己的AI能力。
按照特斯拉的说法,全球有450万台销量,有上千万个特斯拉车主的驾驶视频片段,并且目前特斯拉在全球还有接近200万辆的车队,每天提供视频供特斯拉训练AI模式。
再加上特斯拉有强大和超算中心,有算力,所以才能够实现端到端的自动驾驶,就像人自己开车一样,能自己决策,不需要预设这些规则。
目前在国内,暂时还没有车企搞端到端驾驶,小鹏的端到端据称要8月份上线,华为的ADS3.0据称也是采用端到端技术的,但会随着享界S9上线。