今年,从华为官宣不依赖高精地图的智驾方案,到小鹏、理想也公布去高精地图的高阶智能驾驶方案的时间表,去高精地图的风越刮越猛,但无图的城市NOA方案却真假难辨、鱼龙混杂。
“一些自动驾驶驾驶供应商在用CNN(卷积神经网络的简称,用于传统图像特征识别、提取)包装所谓无图方案忽悠车企。”
11月29日,一向比较低调的智驾科技CEO周圣砚在“虚实之间-BEV新范式和NOA真无图”的技术战略和新品发布会上炮轰了一众拿不出“真无图”智驾方案的同行。
但在自动驾驶市场仍处在教育客户的尴尬阶段,讨论“真假无图方案”,既需要直击对手要害,也要有真本事傍身。
周圣砚介绍称,有没有做到去高精地图,最为关键的要靠以Transformer架构为基础的BEV(bird's eye view鸟瞰图)算法。
BEV相当于上帝视角,能够实时输出动态目标物的4D信息,以及静态目标物的3D信息,从而得到道路信息全景图,摆脱对高精地图的依赖。
早在2019年,马斯克就曾经表示高精地图并非自动驾驶感知的必要部件,因此特斯拉贯彻纯视觉感知路线打造的FSD,在2021年率先采用了BEV的感知方案,2022年又进化成了Occupancy Network占用网络。
而现在,包括智驾科技在内的越来越多的自动驾驶企业正在变成BEV的拥趸。
周圣砚称,早在三年前,公司已启动部署类BEV架构的底层技术栈,内部立项为"上帝视角下的真值系统"。
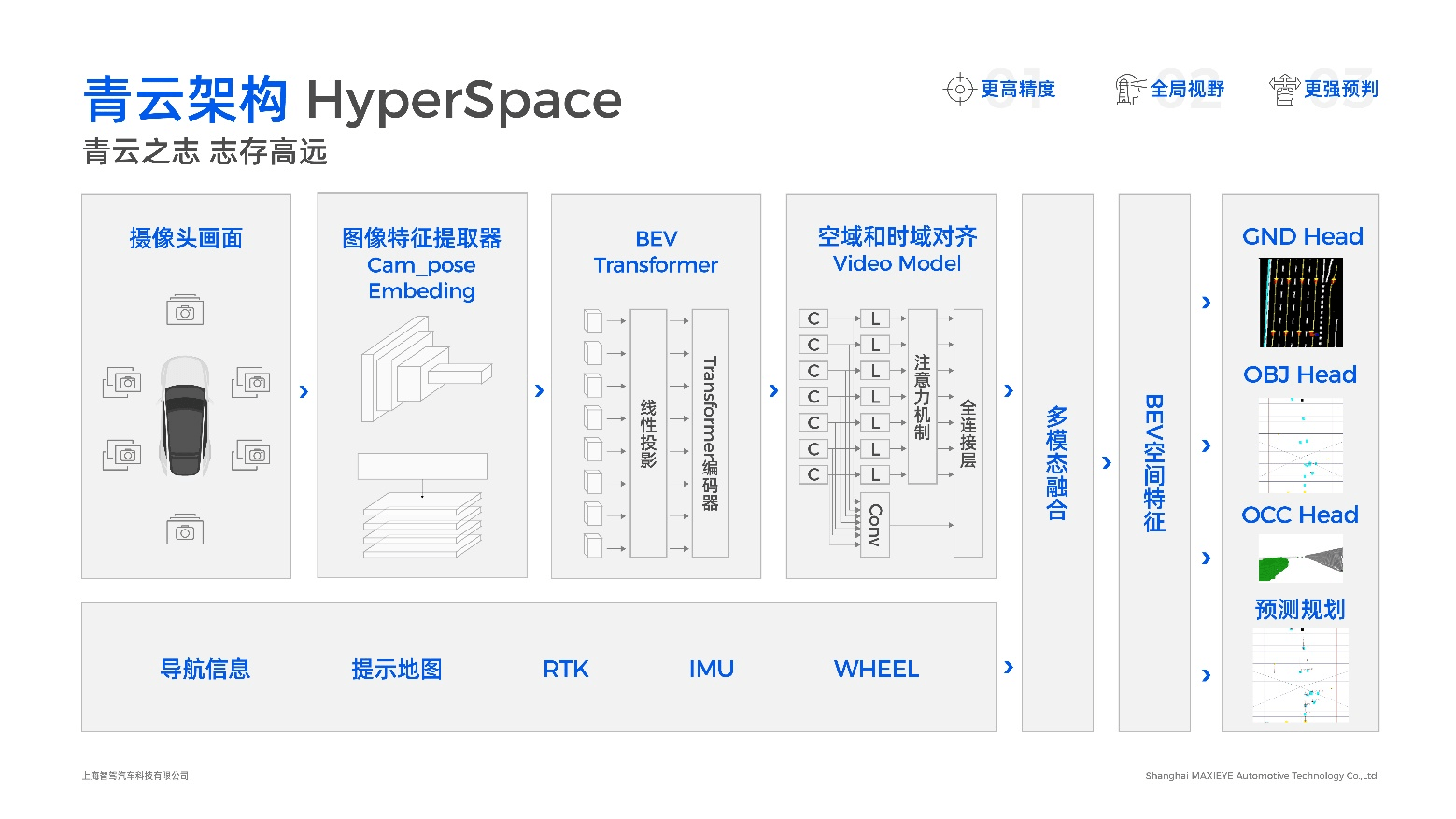
在发布会当天,智驾科技也发布了BEV平台架构「青云Hyperspace」,包含一站式融合道路拓扑、目标轨迹、占用空间三大网络。
除此之外,智驾科技还提出了一个全新的技术与商业模式结合的落地路线:记忆共享=城市NOA。通过记忆泊车、再到记忆行车、最后记忆共享帮助实现城市NOA。
不可否认的是,从今年开始,轻高精地图、甚至是去高精地图的趋势越来越明显。而为了摆脱高精地图,不少自动驾驶研发企业选择了BEV架构算法。
简而言之,BEV能够在鸟瞰图视角下将原有的2D图像转换为3D、4D图像信息。在BEV框架下,感知、预测、规划都可以在同一个空间进行,有利于预测算法的稳定、高效。
三年前,智驾科技启动部署类BEV架构的底层技术栈,内部立项为“上帝视角下的真值系统”。历时3年,智驾科技拿出了青云Hyperspace架构。
在技术上,青云BEV架构覆盖从单V(牧童Monotogo™解决方案)到多V(5V、6V、9V、11V跨越低中高算力的行泊合一域控方案)的MAXIPILOT®全系智驾解决方案矩阵,满足城市L2增强、高速NOM(Navigate on MAXIPILOT®)、城区NOM、行泊合一、记忆行泊车全场景应用。
周圣砚介绍,该架构融合道路拓扑、目标轨迹、占用空间三大网络。
在道路拓扑方面,青云BEV架构可实现道路拓扑横纵向精度的显著提升,横向拓扑精度5公分,纵向拓扑精度误差千分之一,稳定性趋近于真值。利用拓扑元素,加之组合导航算法,青云BEV架构可支持一次性完成自动化建图记忆,奠定记忆共享技术实现的基础。
周圣砚解释称,纵向拓扑精度误差1‰,是指在前方100米处发现换道的分叉点前后误差小于10厘米,基于BEV横向误差5厘米,这个精度比高精地图精度还要高,所以完全够做到无图方案。
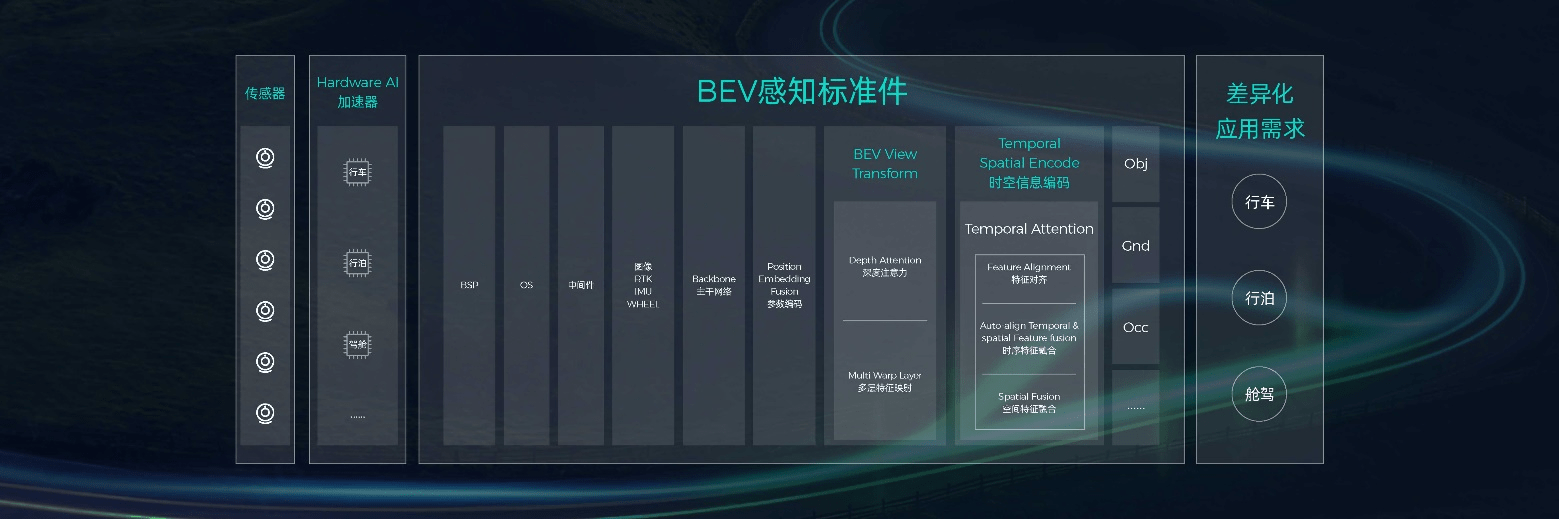
在模式上,智驾科技还提出BEV感知标准件,让青云BEV架构可满足更加灵活、平台化的开发模式,满足面向不同场景应用的高效跨平台移植。
应用层面,青云BEV架构因其高精度、毫秒级建图能力,以及强大的特征信息提取,使得更高性能体验的轻地图NOA功能实现成为可能。而BEV-occ占用空间网络解决了既往通用目标(GOD,general object detection)、静态目标检测的痛点,进一步提升了高阶自动驾驶复杂场景的应对机机制。
此外,青云BEV架构已打通首次行车、再次记图、三次激活的智慧化记忆行泊车功能应用。90%以上场景可支持实现两次行车后记忆功能激活。
基于此,智驾科技还提出了一种新的实现城市NOA的构想,即“记忆共享”。
这种方式能够实现开城效能的指数级提升,相比于高精地图季度级城市更新效能和相对高昂的成本,智驾科技提出的这种“记忆共享=城市NOA”的数据共享方式,实现“低阶赋能高阶”的商业应用和技术升维闭环。
其底层逻辑在于:
首先技术架构上,青云BEV架构实现道路拓扑横纵向精度的显著提升,横向拓扑精度5公分,纵向拓扑精度误差1‰,稳定性趋近于真值。利用拓扑元素,加之组合导航算法,青云BEV架构可支持一次性完成自动化建图记忆,这是技术基础。
其次在产品定义上,智驾科技已实现BEV对MAXIPILOT®全系智能驾驶产品重构,覆盖极致性价比视觉一体机(单视觉牧童Monotogo™方案)到多V域控的丰富产品组合。
这意味着,入门级配置即可支持城区建图,其深远意义在于帮助车厂客户以80%的规模化量产方案为基础,构建20%高配方案所需要的核心场景数据,彻底打通“低阶赋能高阶”的经济且有效的开城路径。
实际上,当下产业的困局在于,车厂高中低配智驾产品方案缺乏技术平台的连贯性,例如L2有L2的供应商,多数缺乏升维能力;高阶有高阶的供应商,多数又在AEB等基础性功能的工程化开发上存在短板。车厂重金布局的城市NOA等高阶场景,眼下又面临成本和体验的多重痛点。
也就是说拥有最显著端上数据优势的车厂,却在城区NOA开发中成为被动的一方。
对此,智驾科技给出的解题思路是,城区驾驶是最高频的用户出行场景,应利用当下搭载量最大的L2性价比方案,打通行车记忆共享的数据通路,以此实现技术和产品方案的延续性,避免高低配置的割裂。这是一条更经济的商业路径,更是一条合理的通向城市NOA高效能开城的闭环逻辑。